Аннотация. В статье рассмотрены возможности создания элективного курса с использованием образовательной робототехники для обучения прототипированию и программированию учащихся основной школы
Ключевые слова: робототехника, САПР, STEM-образование, 3D-моделирование, 3D-печать, микроконтроллер, сервопривод, прототипирование
XXI век – век стремительного развития информационных технологий. Цифровые технологии внедряются повсеместно – от космических исследований до биотехнологий. Современные технологии безусловно оказывают большое влияние на выбор направления трудовой деятельности современного человека. Сейчас научно - техническим исследованиям отводится решающее место. Построение конкурентоспособной экономики государства и благополучного общества невозможно осуществить без подготовки высококвалифицированных инженерных и научно-технических кадров [2]. Современная действительность порождает симбиоз ряда сфер: медицины, биологии, инженерии, информатики, 3D-моделирования робототехники и т. д.
Пример такого симбиоза – профессия будущего «Архитектор медицинского оборудования». Это пересечение профессии инженера и медицинского работника. Данный специалист занимается разработкой дизайна медицинской техники, а также обеспечивать нормальное ее функционирование. Почти во всех современных научно – технических сферах специалистам необходимо владеть навыками 3D-моделирования, программирования. Буквально десять лет назад человечество не могло вообразить, что имплантаты жизненно важных органов можно напечатать на 3D-принтере.
Важную роль в становлении будущих специалистов играет образование, полученное в школе. Возрастает значение предметов естественнонаучной направленности: математики, информатики, физики, биологии, химии. Как показывает мировой опыт, интерес к будущей профессии зарождается ещё в школе. При этом стоит отметить, что на сегодняшний день в школьном образовании актуальным является введение практических курсов, связывающих фундаментальные науки с информационными технологиями [2,8].
За последние годы в мировом образовательном процессе получил распространение такой термин, как STEM-образование (Science, Technology, Engineering, Math – Наука, Технология, Инженерия, Математика) [2,8], то есть обучение с применением междисциплинарного и прикладного подхода. STEM-обучение предполагает совмещение традиционных предметов с практическими занятиями по программированию, 3D-моделированию, робототехнике. Преимуществами данного подхода является развитие мышления, креативности, а также применение фундаментальных законов при проектировании, что мотивирует школьников на изучение точных наук.
Представляет особый интерес создание элективного курса, объединяющего в себе ряд дисциплин: проектирование и конструирование, программирование, робототехника. Конечной целью подобного курса является создание полноценной, работающей модели робота (рисунок 1). Существует множество вариантов для выбора модели робота: андроидные роботы, мобильные роботы, бионические роботы, роботы-манипуляторы. Рассмотрим поэтапно концепцию построения такого курса.

Рис.1 Сервоприводы Dynamixel для нужд образовательной робототехники [5]
В большинстве развитых стран образовательная робототехника прочно заняла свое место в системе образования. Робототехника позволяет организовать междисциплинарную связь ряда дисциплин: физика, мехатроника, технологии, конструирование, инженерная графика, математика, информатика, кибернетика.
Дидактическое оборудование для обучения робототехнике производят такие компании как VEX Robotics, Lego, Robotis, Abilix [1,3,5,6] и т. д. У каждой из них есть готовые решения в виде готовых конструкторских наборов обладающих достаточно высокой стоимостью. Каждый такой конструкторский комплект предполагает создание готовой модели робота. Однако возможно пойти другим путем: приобрести необходимые незаменимые робототехнические элементы, остальные же детали робота изготовить из подручных материалов, в частности методом 3D–печати.
В частности, южнокорейская компания Robotis [5] предлагает широкий модельный ряд сервоприводов для нужд образовательной робототехники (Рис.1).
В качестве системы управления возможно задействовать контроллеры на базе Ардуино. К таким контроллерам можно отнести российскую разработку STEM Board2 [7]. Универсальный робототехнический контроллер STEM Board2 (периферийная плата со встроенным контроллером) совместим с элементами образовательных робототехнических наборов Robotis, что позволяет осуществлять управление сервоприводами Dynamixel через Arduino IDE и соответствующие им среды разработки от Robotis. Такой подход в приобретении робототехнического оборудования позволяет сэкономить средства учебного учреждения.
Элективный курс удобно разделить на несколько тематических модулей или этапов: этап проектирования и конструирования конструкции робота, этап изготовления деталей и узлов робота, сборка робота, отладка и программирование. Каждый из этапов формирует у учащихся особенные навыки и умения. Проходя все эти этапы учащийся соприкасается с рядом дисциплин и задач: трехмерное моделирование, основы черчения, конструирование, основы электроники и программирование.
На первом этапе учащиеся вместе с преподавателем обдумывают принципиальные конструкторские решения: назначение, основные параметры и габаритные размеры будущей модели робота. Производят оценку доступных материальных ресурсов для осуществления проекта: оборудование для 3D-печати, сервоприводы, управляющая плата с микроконтроллером.
Процесс конструирования деталей будущего робота состоит из выбора материала, формы и определения их размеров. Удобно задействовать в учебном процессе одну из программ современных САПР (система автоматизированного проектирования). В зависимости от задач и возможностей учебного учреждения можно подобрать оптимальную программу САПР [7].
Ряд компаний-производителей предлагают бесплатную учебную лицензию на свои программные продукты. К таким программам можно отнести Autodesk Fusion 360, Autodesk Inventor. Необходимо пройти процедуру регистрации на сайте компании и получить учебную лицензию.
Вместе с преподавателем учащиеся осваивают базовые операции создания 3D-объектов. Начать необходимо с освоения построения простых геометрических фигур в редакторе плоских эскизов. Необходимо ознакомится с такими процедурами построения как линия, сплайн, окружность, прямоугольник, радиальный и прямоугольный массив. Учащиеся должны уверенно освоить две основополагающие процедуры: вытяжение и вращение. После этого можно осваивать создание элементарных геометрических примитивов: куб, цилиндр, конус, пирамида, сфера и т. д. В рамках данного этапа учащиеся под руководством педагога более глубоко изучают что такое деталь, сборка. Узнают какие бывают виды деталей, их отличие по форме и назначению. Осваивают построение деталей заданной формы в программе САПР. В этом процессе учащиеся должны умело задействовать навыки, приобретенные на предыдущих занятиях.
Как только учащиеся освоят процесс создания деталей, необходимо обсудить габаритные размеры деталей будущего робота и начать его проектирование. Сперва необходимо обсудить компоновку модели робота и функциональное назначение каждого узла будущего робота. Проектирование деталей робота следует начать с деталей простых по форме и постепенно перейти к более усложненным вариантам (рисунок 2).
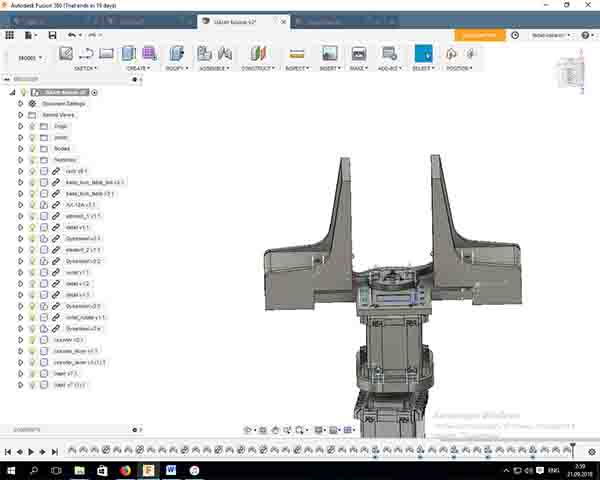
Рис.2 Пример разработки хвата робота - манипулятора в САПР – пакете в рамках элективного курса по робототехнике
Второй этап учебного курса необходимо посвятить производству элементов конструкции робота (рисунок 3). В рамках данного урока учащиеся вместе с педагогом изучают базовые операции механической обработки (сверление, токарные работы, фрезерование и т. д.). Изучают конструкцию и назначения таких устройств как 3D–принтер и лазерный гравер. Изучают сферы применения 3D–печати. Вместе с преподавателем осваивают процесс конвертации 3D-модели в воспринимаемую 3D-принтером или лазерным гравером информацию при помощи специальной программы 3D-слайсера.

Рис.3 Комплект деталей для создания робота – манипулятора, напечатанных 3D – принтере
Третьим важным этапом в элективном курсе является процесс сборки и отладки спроектированной модели робота. В процессе сборки учащиеся соединяют звенья робота и сервоприводы в единую конструкцию. Процесс сборки отлично резюмирует и подытоживает знания и навыки, полученные на предыдущих этапах (рисунок 4). Данный этап предоставляет возможность учащимся прикоснуться к результатам своего труда и повысить заинтересованность для последующего обучения.
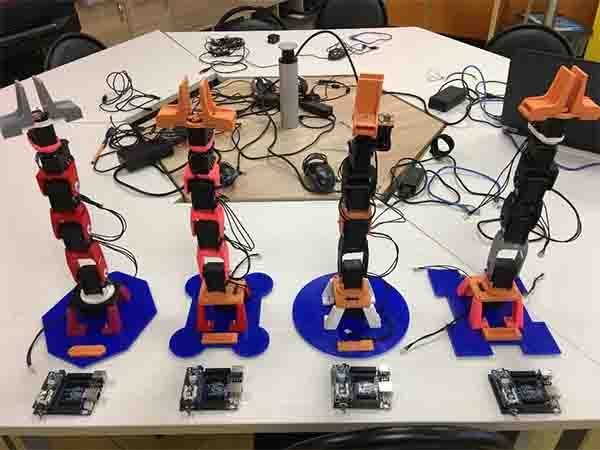
Рис.4 Сборка моделей роботов-манипуляторов из напечатанного на 3D–принтере комплекта деталей
Четвертый этап посвящен освоению учащимися навыков программирования робота. На данном этапе учащимся предстоит «оживить» собранную конструкцию робота. Учащиеся знакомятся с такими устройствами как управляющая плата, микроконтроллер, сервопривод. Для управления роботом необходимо использовать плату управления с микроконтроллером. Российскими разработчиками создана плата Stem Board2 [4], которая в комплекте с контроллером Open CM от компании Robotis [5] дает широкие возможности по управлению сервоприводами роботов. Для программирования робота необходимо использовать специальную среду разработки, предназначенную для управления платой с подключенными сервоприводами. Например, среды Arduino IDE и Robotis_OpenCM обладают встроенными библиотеками по управлению сервоприводами.
Обязательно следует сформировать знания у учащихся по начальным понятиям программирования, такими как: архитектура компьютера, системы счисления, компилятор, переменная, функция, библиотека функций. Весь процесс следует сопровождать задачами программирования постепенно повышающейся сложности. После овладения учащимися базовых навыков программирования можно подходить к освоению управлением непосредственно сервоприводами созданного робота.
После формирования и закрепления знаний и навыков о принципах работы и управления сервоприводами и микроконтроллером следует перейти к изучению программирования самой модели сконструированного робота. Учащиеся вместе с преподавателем осваивают написание простых программ с использованием стандартных библиотек по управлению сервоприводами. Уверенно используя навыки программирования, учащиеся осваивают управление роботом для выполнения специальных упражнений. К таким упражнениям можно отнести: перемещение груза, перемещение груза от робота к роботу, крестики и нолики с помощью роботов, танец роботов. Последним важным этапом является подготовка к защите учащимися созданных проектов. На данном этапе ученики смогут показать глубину своих знаний в предлагаемой области, получить опыт публичного выступления, проявить личную заинтересованность темой созданного проекта. У преподавателя будет возможность оценить, во-первых, умение учеников вести диалог, защищать свой проект; во-вторых, умение позиционировать себя; в-третьих, качество подготовки учащихся.
Таким образом, внедрение в образовательный процесс предложенного элективного курса даст возможность объединить ряд учебных дисциплин: трехмерное моделирование, основы черчения, конструирование, основы электроники и программирование. Каждый из этапов предложенного курса сформирует у учащихся ряд специализированных навыков и умений: начиная от эскизного проектирования конструкции робота и заканчивая защитой созданного проекта. Изложенный подход заложит фундамент становления учащихся как специалистов будущего, умеющих комплексно решать инженерно-технические задачи, применяя знания из разных направлений.
Elective course on training in prototyping and programming with use of robotics of pupils of the main school
Makaev A.G.,
undergraduate of 2 course of the Moscow City University, Moscow
Research supervisor:
Grigorieva Marina Alexandrovna,
teacher of the Institute of Digital Education of The Moscow City University, candidate of pedagogical sciences, associate professor
Annotation. The paper is devoted to a brief overview of the introduction of the basics of robotics in the educational process in primary school. The approach in teaching students with the joint use of 3D modeling tools, 3D printing and educational robotics is considered
Keywords: robotics, CAD, 3D modeling, 3D printing, microcontroller, servo, prototyping
- Горнов О.А. Основы робототехники и программирования с VEX EDR. М.: Издательство «Экзамен», 2016. 160 с.
- Григорьев С.Г., Курносенко М.В. Инженерное образование и STEM образование. Реальность и перспективы // Красноярск: Статья в сборнике трудов конференции. Информатизация образования и методика электронного обучения, 2018. С. 13 - 19
- Лоренс Валк Большая книга LEGO MINDSTORMS EV3. М.: Эксмо, 2017. 408с.
- Периферийная плата универсального робототехнического контроллера STEM Board. URL: http://robotgeeks.ru/collection/komponenty-dlya-robotis/product/periferiynaya-plata-universalnogo-robototehnicheskogo-kontrollera-stem-board (дата обращения: 11.03.2019).
- Робототехнические конструкторы Robotis. URL: http://edurobots.ru/2016/05/robototexnicheskie-konstruktory-robotis (дата обращения: 12.03.2019).
- Робототехнические конструкторы Abilix URL: http://abilix.com (дата обращения: 15.03.2019).
- Садыкова А.Р., Григорьева М.А., Тамошина Н.Д. Методический опыт внедрения STEM – технологий в процесс подготовки бакалавров педагогического направления // Информатика и образование, 2018. № 5 (294). С. 41-43.
- Исаева И.Е. Современные Сапр и их многообразие. URL: http://www.lib.tpu.ru/fulltext/c/2013/C34/011.pdf (дата обращения: 11.03.2019).
- Gornov O.A. Fundamentals of robotics and programming with VEX EDR. M.: Ekzamen publishing house, 2016. 160 pages.
- Grigoriev S. G., Kurnosenko M.V. Engineering education and STEM education. Reality and perspectives//Krasnoyarsk: Article in the collection of works of a conference. Informatization of education and technique of e-learning, 2018. Page 13 - 19
- Laurence Valc Big book LEGO MINDSTORMS EV3. M.: Eksmo, 2017. 408 pages.
- Peripheral payment of the universal robotic STEM Board controller. URL: http://robotgeeks.ru/collection/komponenty-dlya-robotis/product/periferiynaya-plata-universalnogo-robototehnicheskogo-kontrollera-stem-board (date of the address: 11.03.2019).
- Robotic designers of Robotis. URL: http://edurobots.ru/2016/05/robototexnicheskie-konstruktory-robotis (date of the address: 12.03.2019).
- Robotic designers of Abilix URL: http://abilix.com (date of the address: 15.03.2019).
- Sadykova A.R., Grigorieva M.A., Tamoshina N.D. Methodical experience of implementation of STEM – technologies in process of training of bachelors of the pedagogical direction//Information science and education, 2018. No. 5 (294). Page 41-43.
- Isaeva I.E. Modern CAD and their variety. URL: http://www.lib.tpu.ru/fulltext/c/2013/C34/011.pdf (date of the address: 11.03.2019).